Line Following Robot Using STM32F1 Microcontroller
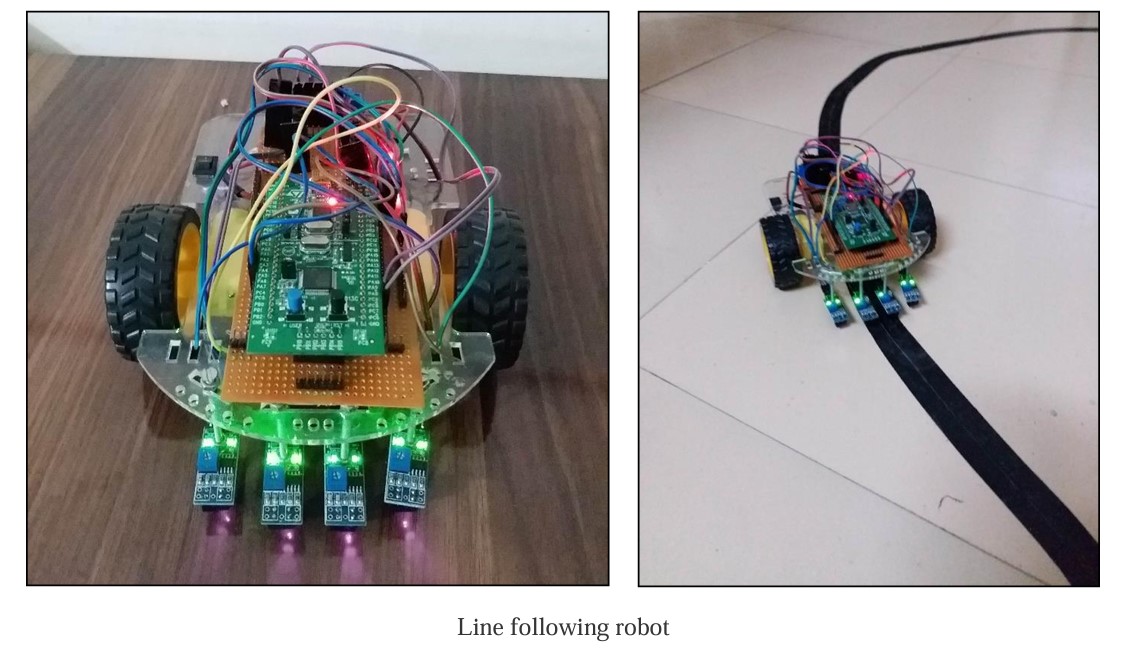
A line-following robot utilizing the STM32F1 microcontroller. The robot was designed to detect and follow a black line path using infrared sensors and respond in real-time through a programmed control algorithm.
The robot’s hardware setup included IR sensors for line detection, motor drivers for movement, and a regulated power supply for reliable operation. The STM32F1 processed sensor data to determine directional movement and adjusted the motors accordingly to maintain alignment with the line.
Hands-on experience with core embedded system skills including sensor interfacing, real-time algorithm development, and motor control. It also provided practical experience in autonomous robotics and STM32 microcontroller programming.
Technologies Used:
STM32F1 Microcontroller
Embedded C Programming
Infrared (IR) Sensors
Motor Driver Circuits
Real-Time Control Algorithms
Power Electronics (Regulated Power Supply)
Autonomous Robotics
Sensor Interfacing
Motor Control Systems